
科研成果:
建立了单调惯性系统模型;
建立了基于全息控制规则的智能模糊控制系统稳定性与主要控制品质参数的模糊定量分析理论;
建立了基于邻域系统的控制与决策模型。该模型可广泛用于多输入多输出系统的动态控制与决策问题;
先后主持或主研国家自然科学基金和国家经贸委重大技术开发项目、省部级科研项目和横向课题多项;
开发出多种实用工业过程控制和家用模糊控制产品;获实用新型专利3项。
下图为模糊控制倒立摆演示实验系统,可以用以说明控制算法的有效性。

下图为机器人实验系统

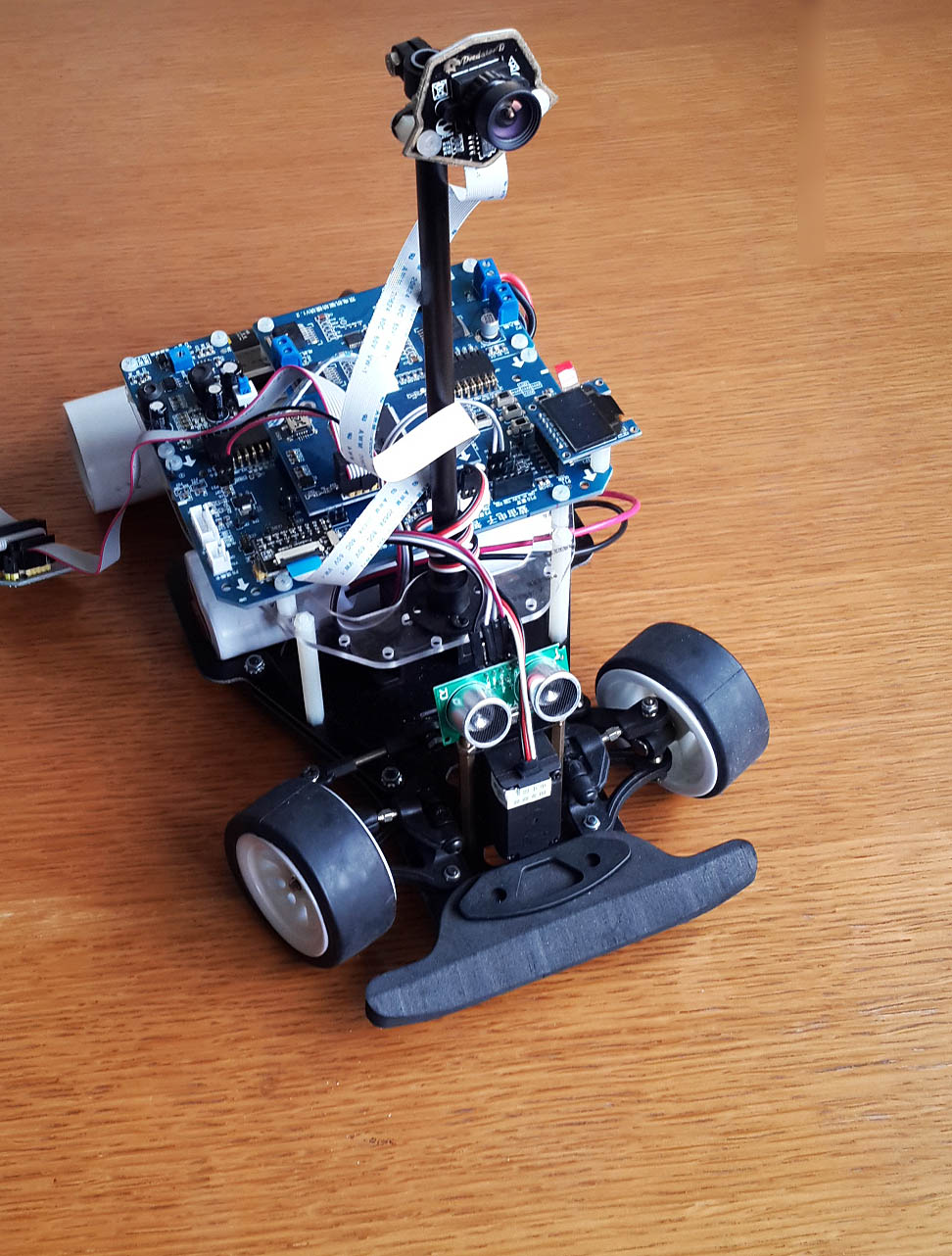
下面分别为基于LabVIEW的智能车实验系统和在飞思卡尔竞赛车模基础上构建的智能车实验系统
 ,
,  ,
, 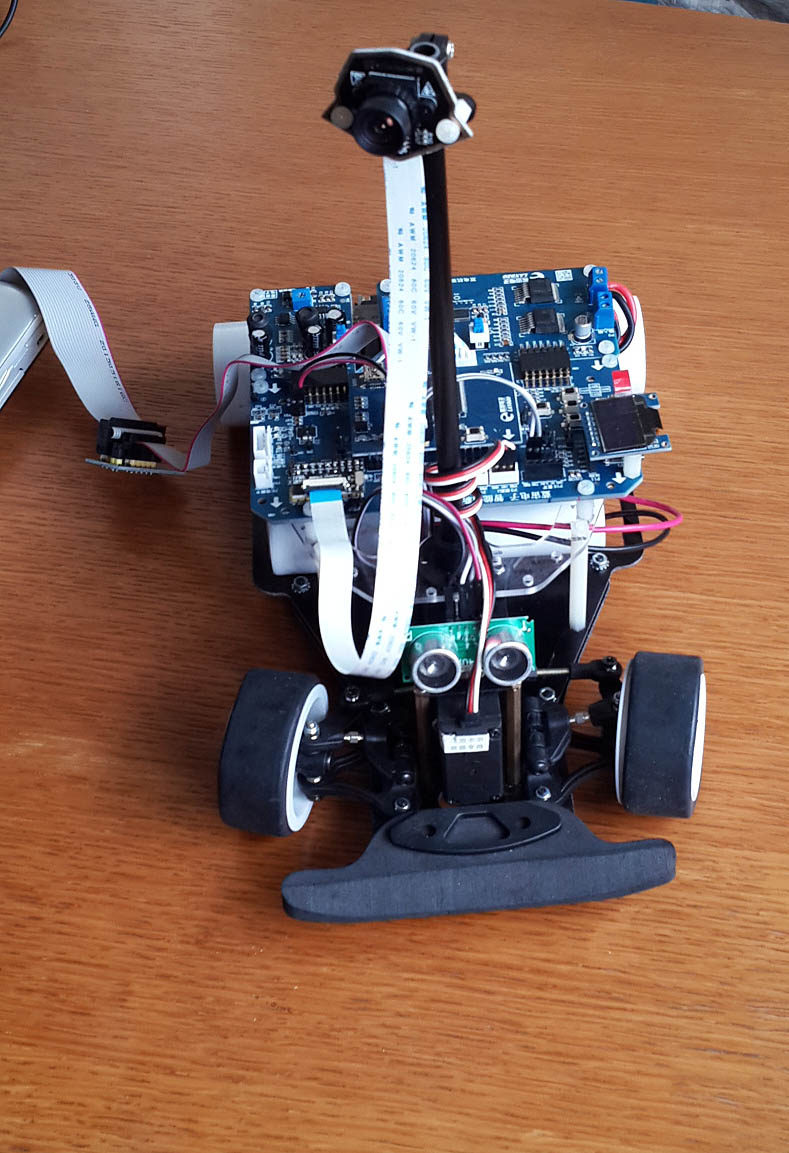
无论是机器人系统还是智能车系统均专门针对数学背景的理科生构建(无需硬件底层基础),
只需专注基于图形化编程和C语言编程下的算法实现,可方便验证控制理论和算法,
可快速发现问题,可使抽象的理论研究变为“看得着”和“摸得着”的受问题驱动下的实验研究,而更具针对性。
在研项目:
主研国家自然科学基金: 基于模糊软集的不确定性推理研究;项目编号:61473239
主研中央高校基本科研业务费专项资金:模糊信息处理与信息编码的代数理论;项目编号:2682014ZT28
目前正在着手研究与处理的主要问题:
基于邻域系统的互联网大数据建模问题
* 邻域能量的量化分析模型;
* 邻域系统能量的传递模型;
* 互联网中信息传递的最佳邻域通道。
智能交通运输系统涉及的若干子问题
* 汽车自动驾驶的控制算法与仿真技术;
* 基于邻域系统的多目标实时优化与决策;
* 粗糙集下的粗糙知识推理理论及其在多目标实时优化与决策过程中的应用;
* 规则库提取方法,自学习,仿真技术等问题;
* 综合评判的若干理论问题。
矿物挑拣设备的智能控制算法
* 涉及多目标优化与分层控制;
* 快速图像识别算法;
* 频谱特征识别等数学方法的建立;
导航系统的若干智能算法问题
* 道路信息提取与记忆,数据的更新技术,
* 快速路径规划的分层优化之推理规则提取
* 快速插值推理算法的研究
学术论文
发表的论文:
[56]. Lisha Yang,Hailiang Zhao, Yi Tang. Expression Recognition Based on Image Fusion and Transfer,.16th International Conference on Intelligent Systems and Knowledge
Engineering. Chengdu,China,2021,Nov.26-28.
[55]. Yi Tang,Hailiang Zhao,Lisha Yang. A Fast Map Construction Method for Indoor Mobile Robot. 2021 IEEE International Conference on Digital Twins & Parallel
Intelligence,Jul.15 - Aug.15, 2021 , Beijing, China pp110-113.
[54]. Yu Dai;Hailiang Zhao; Xue Zhang. Evaluation Method of Teaching Effect Based on Visual Calculation in Classroom Environment, 2021 IEEE 5th Advanced Information
Technology, Electronic and Automation Control Conference (IAEAC 2021) Vol.5 pp1821-1825.
[53]. Xue Zhang;Hailiang Zhao;Yu Dai. Small Scale Face Detection Method in Dense Scene. 2021 IEEE 5th Advanced Information Technology, Electronic and Automation
Control Conference (IAEAC 2021) Vol.5 pp1826-1830.
[52] 王志刚,赵海良,王星. 基于图像识别的模糊测距方法[J]. 重庆理工大学学报(自然科学),2020,34(1);58-63,
[51] 王星,赵海良,王志刚。基于邻域系统的智能车辆最优控制轨迹规划方法,智能系统学报,Vol.14 No.5,2019.9, pp1040-1047.
[50] Qiaoli Wang, Hailiang Zhao, Website Information Push Channel Analysis, 2019 the 4th International Conference on Cloud Computing and Big Data
Analytics (ICCCBDA 2019), April 12-15, 2019,Chengdu,China, pp460-464.
[49] Lei Huang; Ying Xu; Hailiang Zhao; A Multi-objective Optimization Model for Determining the Optimal Standard Feasible Neighborhood of Intelligent
Vehicles, Proceedings of 15th Pacific Rim International Conference on Artificial Intelligence: Lecture Notes in Artificial Intelligence. Nanjing, China 28-31
Aug. 2018 pp:268-281
[48] Xing Wang, Hailiang Zhao, Zhigang wang, Research on Optimal Trajectory Curve of Intelligent Vehicle Based on Neighborhood System. FLINES 2018
conference,Aug.21-24,2018, Belfast,Northern Ireland.UK. pp968-976.
[47] Junxuan He; Hailiang Zhao; Yi Jiang, Method for determining comprehensive weight vector based on multiple linear fitting.
Proceedings of 2017 12th International Conference on ISKE, 24-26 Nov. 2017,Nanjing, China.
[46] Yi Jiang; Hailiang Zhao; Junxuan He, The relation between fuzzy soft set and integrative fuzzy set, Proceedings of 2017 12th
International Conference on ISKE. 24-26 Nov. 2017,Nanjing, China.
[45] Meng, Hua; Zhao, Hailiang; Chu, Jielei Relationship Among Different Constructive Models of Belief Revision, Proceedings of 13th IEEE International
Conference on Control & Automation (ICCA), JUL 03-06, 2017, Ohrid, MACEDONIA, pp999-1003.
[44] 付慧敏,赵海良,江怡。基于邻域系统控制的智能车倒车入库算法,模糊系统与数学,Vol.30 No.2,2016.4(103-115)
[43] Hailiang Zhao, Motion Planning for Intelligent Cars Following Roads Based on Feasible Neighborhood. Proceedings of 2014 IEEE International Conference on Control Science and Systems Engineering,December 29-30, 2014, Yantai, China, pp27-31.
[42] Zhou Xiaojuan and Hailiang Zhao,Optimization Analysis of Input Combinations for the Multivariable Systems. Proceedings of 2014 IEEE International Conference on Control Science and Systems Engineering,Dec. 29-30, 2014, Yantai, China, pp200-204.
[41] Hailiang Zhao, A Search Method for Feasible Neighborhoods of Intelligent Car Based on Neighborhood Systems. Decision Making and Soft Computing. Proceedings of the 11th International FLINS Conference. Jo?o Pessoa (Paraíba), Brazil 17-20 Aug. 2014.8, pp595-600
[40] Hailiang Zhao, A Dynamic Optimization Decision and Control Model Based on Neighborhood Systems, Proceedings of 2013 6rd International Congress on Image and Signal Processing, Dec.16-18 2013, Hangzhou, China,pp1319-1324.
[39] 卿冬梅, 赵海良, 分段二次保极值的保形插值方法。 西南民族大学学报(自然科学版)第39卷第4期,2013.7( 575-579).
[38] 熊升华,赵海良, 基于矩形安全邻域的智能车移动仿真研究,计算机应用研究,第30卷第12期2013.12(3593-3596)
[37] Hailiang Zhao, Rationality Criterion of Comprehensive Evaluation Method, Proceedings of 2012 9th International Conference on Fuzzy Systems and Knowledge Discovery, May 29-31,2012, Chongqing,China, pp139-143.
[36] 杨文光,赵海良, 自动倒车简易模糊插值控制, 中山大学学报自然科学版 Vol.51 No.1 2012年1月(5-38).
[35] Heng LIU, Hailiang ZHAO. An H? Adaptive Fuzzy Control for a Class of Uncertain Nonlinear Systems, Journal of Computational Information Systems 8:17 (2012) 7053–7060.
[34] Hailiang Zhao, Simulation Technique Analysis on Intelligent Control Systems,Proceedings of 2011 IEEE International Conference on Intelligent Computing and Intelligent Systems, November 18-20, 2011, Guangzhou, China, pp694-698.
[33] 赵海良,智能控制系统仿真技术分析,软件,Vol.32 No.7 2011年7月(15-20).
[32] 赵海良,简易插值模糊推理方法,模糊系统与数学,Vol.24.No.6 2010年12月(8-16).
[31] 杨文光,赵海良, 基于样条插值的模糊控制算法,模糊系统与数学,Vol.23.No.3 2009年6月(152-157).
[30] 郑怡,赵海良,徐永,基于Matlab 的动态规划问题, 重庆工学院学报,Vol.22, 2008年5月(152-155).
[29] 杨文光,赵海良,多重模糊稀疏规则库下的线性插值推理方法,宝鸡文理学院学报,Vol.28,No.2, 2008年6月(106-109)。
[28] 杨文光,赵海良,一类非线性系统的模糊推理建模与控制仿真,河北科技大学学报,Vol. 29, No.2, 2008年6月 (165-168.).
[27] 徐永,赵海良,郑怡. 基于机器视觉的车辆自动驾驶模糊控制设计.北华大学学报,2008年01月,(89-92).
[26] 徐永,赵海良,赵丽元. Mamdani型模糊控制器控制特性仿真. 西南交通大学学报,2007年5月,第42卷(增刊),(103-105).
[25] Hailiang Zhao and Yue Ma, Connotation Searching Method for Paper Retrieval System Based on Fuzzy Rules, Proceedings of the 2007
International Conference on Intelligent Systems and Knowledge Engineering 15-16 Oct. 2007,Chengdu,China pp964-969
[24] Yuhui Wang, Hailiang zhao , Subject Identification Method Based on Extended Keywords Set . Proceedings of 2006 Symposium on Information Electronics, and Control Technologies, Chengdu, China. 2006, 114—116
[23] 王会勇,赵海良,杨晓伟。基于拓扑变换的一种不确定性推理方法, 重庆交通学院学报,Vol.23. No.1,2004 (112-115).
[22] Hailiang Zhao, Rule Chain and Dominant Rule Control Algorithm for Unknown Nonlinear Systems, Proceedings of IEEE 2004 International Conference on Fuzzy Systems, Budapest, Hungary, July 25-29, 2004.
[21] Hailiang Zhao, Robust Fuzzy Control Method For Monotone Inertial Systems, Proceedings of 2004 IEEE International Conference On Systems, Man & Cybernetics, pp.6102-6107, The Hague,The Netherlands October 10-13, 2004.
[20] Ming Qing, Hai-Liang Zhao, Shi-Fen Xia, Xue-Fang Wang, Constructing A Kind Of Fuzzy Systems Based On Neural Networks Techniques, Proceedings of the Second International Conference on Machine Learning and Cybernetics, Xi'an,2-5 November,pp2629-2633,2003.
[19] Hailiang Zhao, Tsu-Tian Lee, Monotone Inertial System Model for Unknown Nonlinear Systems, Proceedings of 2003 IEEE International Conference On Systems, Man & Cybernetics, October 5-8, pp.3542-3547, 2003.
[18] Hailiang Zhao and Ming Qing, Method To Obtain Effective Rule Base For Unknown Nonlinear Systems, Proceedings of the Second International Conference on Machine Learning and Cybernetics, Xi’an, 2-5 November , pp519-524, 2003.
[17] Hailiang Zhao,Tsu-Tian Lee, Research On Multiobjective Optimization Control for Unknown Nonlinear Systems, Proceedings of IEEE 2003 International Conference on Fuzzy Systems, May 25-28,. St. Louis, MO, USA, pp.402-406. 2003.
[16] 赵海良. 规则基控制系统稳定性分析。信息与智能系统,北方交通大学出版社,2001年9月(347-354)
[15] 赵海良. 单调惯性系统的智能模糊控制理论研究. 西南交通大学研究生博士论文, 2001年6月
[14] 赵海良. 诸昌钤。分档隶属函数对控制算法单调性的影响, 模糊系统与数学,第十四卷,模糊集理论与模糊应用专集,2000年10月(119-123)
[13] Hailiang Zhao and Changqian Zhu, Monotone Fuzzy Control Method and Its Control Performance, SMC 2000 Conference Proceedings, 2000 IEEE International Conference on Systems, Man & Cybernetics. Nashville, Tennessee,USA, (3740-3745) .
[12] 赵海良. 强制稳定模糊控制系统设计方法,西南交大学报, 2000年第35卷第4期(434-439)
[11] Hailiang Zhao. Stability Analysis Using Control Rule Base for Fuzzy Control System with Multivariable, Intelligent Techniques and Soft Computing in Nuclear Science and Engineering. Edited By Da Ruan, World Scientific. (Proceedings of the 4th international FLINS Conference Bruges, Belgium, August 28-30, 2000)(134-141).
[10] 赵海良, 高隆昌。一类邻域系统的能量与状态控制策略分析。中国管理科学,第7卷专集1999年11月(276-280)。
[9] 赵海良. 诸昌钤。牵引电动机计算机辅助智能试验系统,计算机应用研究。1998年第18卷第1期(6—10)
[8] 赵海良. 直流斩波机车恒流控制规则化方法。模糊集理论与应用(1998年中国模糊数学与模糊系统委员会第九届年会论文选集)(708—713)。
[7] 赵海良. 定点模糊控制系统的稳定性. 兰州大学学报(自然科学版) 1996年, 第32卷(模糊数学与模糊系统)专集 (369~372)
[6] 赵海良. 定点模糊控制系统的动态性能分析. 数学季刊 1995年, Vol.10(增刊) (63~66)
[5] 赵海良.多参数模糊控制系统的一种反馈结构。模糊系统与数学,1994年第8卷增刊(332—335)
[4] 赵海良. 全序模糊数模糊关系方程的解. 西南交通大学学报。No.2.1993 (93-99)
[3] Huang Tianmin, Xu Yang, Zhao Hailiang, Wu Jianle. Fuzzy Control Lattices and Its Applications. Proceedings of international Conference on Modelling and Simulation and Control, AMSE 1993, Oct. 13-15, 1993. Chengdu, P.R.China. (129-132).
[2] Zhao Hailiang, Xuyang, Huang Tianmin. Local solution of fuzzy relation equation with fuzzy number. Proc. of the Fifth International Fuzzy Systems Association World Congress, Seoul, KOREA, 1993,283-285.
[1] Zhao Hailiang, Structure of fuzzy relation equation system with fuzzy number in a linearly ordered set. Journal of Southwest Jiaotong University, Vol.1.No.2 Nov. 1993,147-154.
现主要研究方向:
(1) 模糊信息处理理论。
(2) 多目标智能控制系统。
(3) 智能机器人和车辆自动驾驶控制。
 报考该导师研究生的方式
报考该导师研究生的方式欢迎你报考赵海良老师的研究生,报考有以下方式:
1、参加西南交通大学暑期夏令营活动,提交导师意向时,选择赵海良老师,你的所有申请信息将发送给赵海良老师,老师看到后将和你取得联系,点击此处参加夏令营活动
2、如果你能获得所在学校的推免生资格,欢迎通过推免方式申请赵海良老师研究生,可以通过系统的推免生预报名系统提交申请,并选择意向导师为赵海良老师,老师看到信息后将和你取得联系,点击此处推免生预报名
3、参加全国硕士研究生统一招生考试报考赵海良老师招收的专业和方向,进入复试后提交导师意向时选择赵海良老师。
4、如果你有兴趣攻读赵海良老师博士研究生,可以通过申请考核或者统一招考等方式报考该导师博士研究生。
