
科研成果:
建立了单调惯性系统模型;
建立了基于全息控制规则的智能模糊控制系统稳定性与主要控制品质参数的模糊定量分析理论;
建立了基于邻域系统的控制与决策模型。该模型可广泛用于多输入多输出系统的动态控制与决策问题;
先后主持或主研国家自然科学基金和国家经贸委重大技术开发项目、省部级科研项目和横向课题多项;
开发出多种实用工业过程控制和家用模糊控制产品;获实用新型专利3项。
下图为模糊控制倒立摆演示实验系统,可以用以说明控制算法的有效性。

下图为机器人实验系统

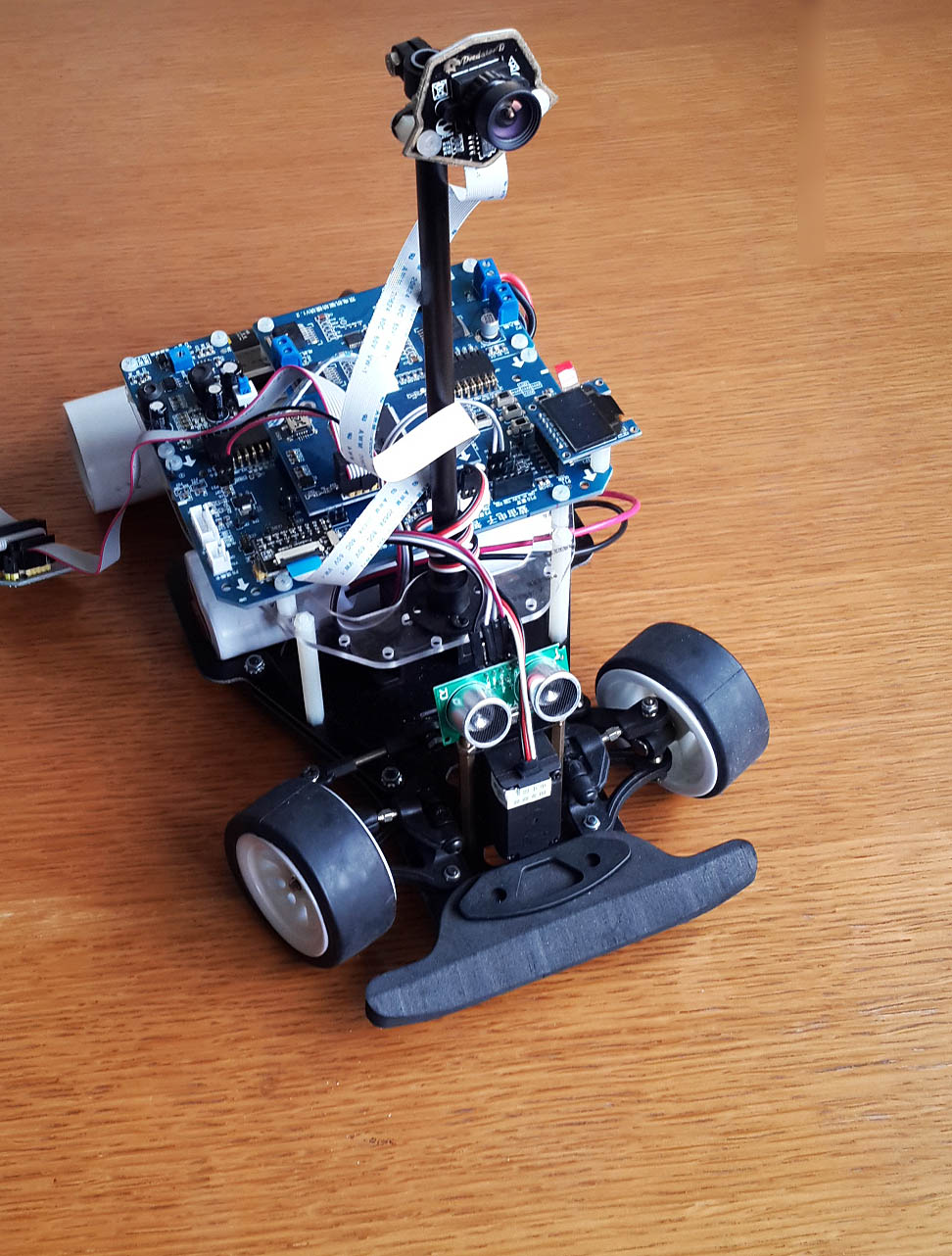
下面分别为基于LabVIEW的智能车实验系统和在飞思卡尔竞赛车模基础上构建的智能车实验系统
 ,
,  ,
, 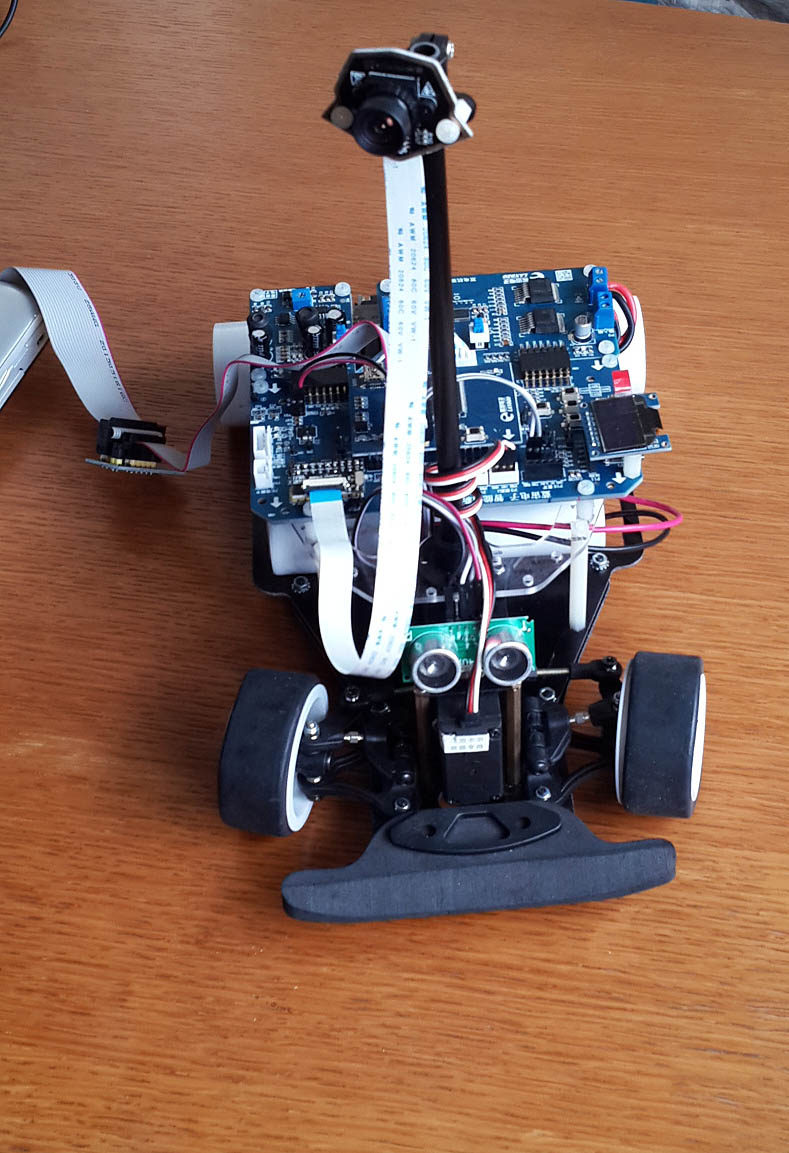
无论是机器人系统还是智能车系统均专门针对数学背景的理科生构建(无需硬件底层基础),
只需专注基于图形化编程和C语言编程下的算法实现,可方便验证控制理论和算法,
可快速发现问题,可使抽象的理论研究变为“看得着”和“摸得着”的受问题驱动下的实验研究,而更具针对性。
在研项目:
主研国家自然科学基金: 基于模糊软集的不确定性推理研究;项目编号:61473239
主研中央高校基本科研业务费专项资金:模糊信息处理与信息编码的代数理论;项目编号:2682014ZT28
目前正在着手研究与处理的主要问题:
基于邻域系统的互联网大数据建模问题
* 邻域能量的量化分析模型;
* 邻域系统能量的传递模型;
* 互联网中信息传递的最佳邻域通道。
智能交通运输系统涉及的若干子问题
* 汽车自动驾驶的控制算法与仿真技术;
* 基于邻域系统的多目标实时优化与决策;
* 粗糙集下的粗糙知识推理理论及其在多目标实时优化与决策过程中的应用;
* 规则库提取方法,自学习,仿真技术等问题;
* 综合评判的若干理论问题。
矿物挑拣设备的智能控制算法
* 涉及多目标优化与分层控制;
* 快速图像识别算法;
* 频谱特征识别等数学方法的建立;
导航系统的若干智能算法问题
* 道路信息提取与记忆,数据的更新技术,
* 快速路径规划的分层优化之推理规则提取
* 快速插值推理算法的研究
 报考该导师研究生的方式
报考该导师研究生的方式欢迎你报考赵海良老师的研究生,报考有以下方式:
1、参加西南交通大学暑期夏令营活动,提交导师意向时,选择赵海良老师,你的所有申请信息将发送给赵海良老师,老师看到后将和你取得联系,点击此处参加夏令营活动
2、如果你能获得所在学校的推免生资格,欢迎通过推免方式申请赵海良老师研究生,可以通过系统的推免生预报名系统提交申请,并选择意向导师为赵海良老师,老师看到信息后将和你取得联系,点击此处推免生预报名
3、参加全国硕士研究生统一招生考试报考赵海良老师招收的专业和方向,进入复试后提交导师意向时选择赵海良老师。
4、如果你有兴趣攻读赵海良老师博士研究生,可以通过申请考核或者统一招考等方式报考该导师博士研究生。
