
 中文
中文Current position: Home > Research > Paper Publications
Paper Publications
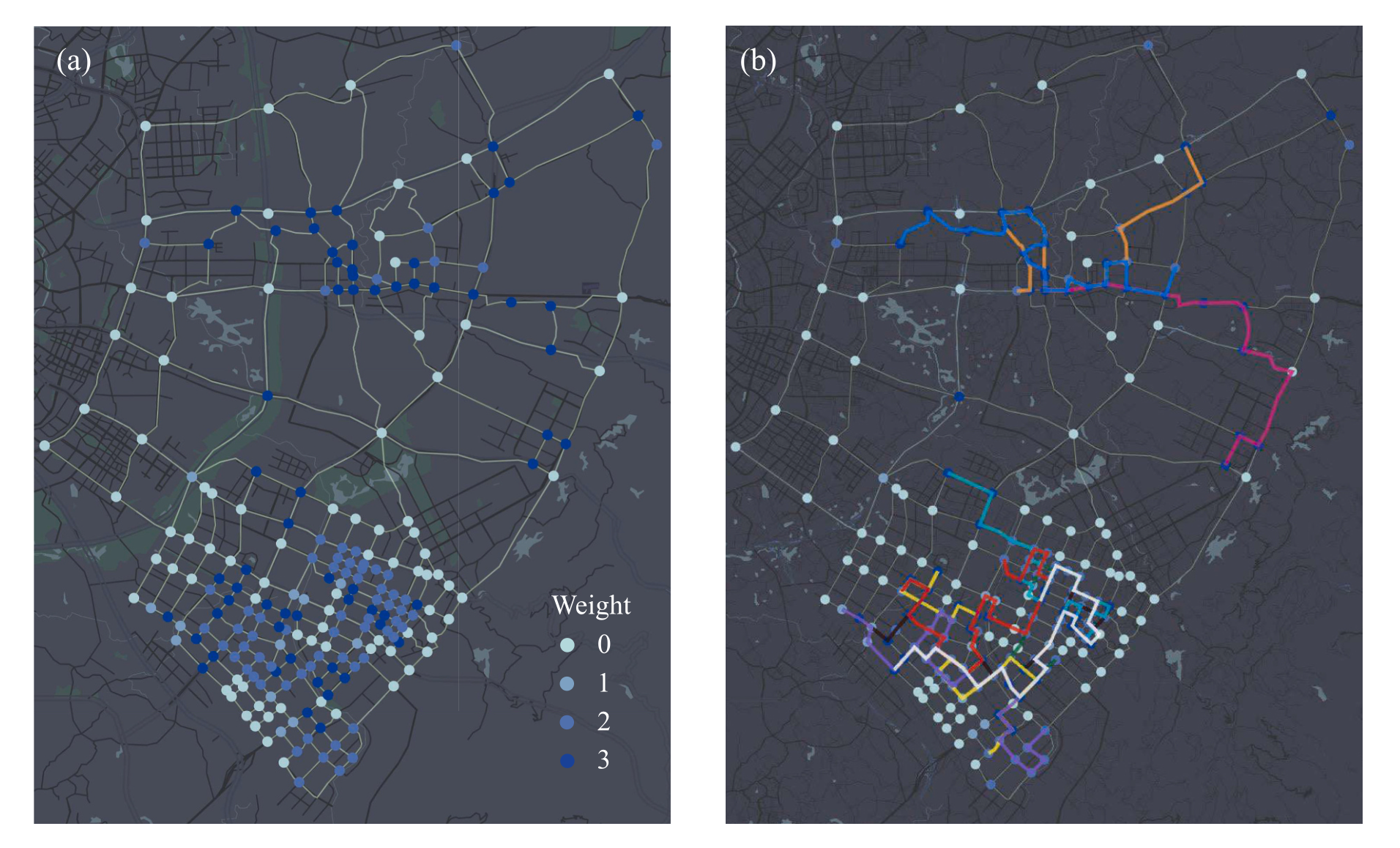
Route planning of mobile sensing fleets for repeatable environmental monitoring tasks
Impact Factor:8.3
DOI number:10.1016/j.compenvurbsys.2025.102285
Journal:Computers, Environment and Urban Systems
Abstract:Vehicle-based mobile sensing is a new paradigm for urban data collection. Certain urban sensing scenarios require sensing vehicles for highly targeted monitoring, such as air pollutant and accident site investigation. A hallmark of these scenarios is that the points of interest (POIs) need to be repeatedly visited by a set of agents, whose routes should provide sufficient sensing coverage with coordinated overlap at certain important POIs. For these applications, this paper presents the open team orienteering problem with repeatable visits (OTOP-RV) and specifically tailors an adaptive large neighborhood search (ALNS) algorithm to address it. Test results on randomly generated datasets show that the ALNS significantly outperforms the greedy algorithm (by 7.2 % to 32.4 %), and a heuristic based on sequential orienteering problem (by about 6 %). Finally, a real-world air pollution sensing case study demonstrates the unique applicability of the OTOP-RV and the effectiveness of the proposed algorithms in enhancing sensing capabilities.
Indexed by:Journal articles
Volume:119
Page Number:102285
Translation or Not:no
Date of Publication:2025-03-28
Included Journals:SCI
Links to published journals:https://www.sciencedirect.com/science/article/pii/S0198971525000389?via%3Dihub
Attachments:
Han Ke
Professor
Supervisor of Doctorate Candidates
Supervisor of Master's Candidates